3. Potential Flows
In this chapter we will introduce a number of “basic ideal flows”. These flows will form a basis from which we can construct more complex flows. The basic principle we are relying on is “superposition”. This allows the linear addition of various flows that then result in more complicated flows. This is possible because the basic underlying equations that govern the flows are linear.
We have shown that there is an orthogonal relationship that exists between two variables that describe the flow, streamfunction and velocity potential, for ideal (irrotational and incompressible with zero viscous forces) flows. The orthogonal condition indicates that if we know one of these it is rather straight-forward to determine the other. We will use both of these flow descriptors to some extend, but mostly use the streamfunction representation of the various flows that we will consider. We will also restrict our results to two dimensional cases, although this is not necessary in general. Our basic equations are the Laplace equations we found in the previous chapter for the streamfunction,  , and velocity potential,
, and velocity potential,  .
.
For ideal flows we have the simplified continuity equation that treats the density as a constant, and allows the elimination of the density directly in the equation. This results in a relationship among the velocity components that must hold true to satisfy conservation of mass. Also, the irrotational flow condition requires the vorticity to be zero which leads to additional conditions on velocity derivatives within the flow. The boundary conditions need to be specified for such flows, and are required to solve the governing equations. Since these flows are inviscid we do not have the no-slip boundary condition to help specify the value of the velocity. This implies that the velocity may be some (finite) value at a surface, not equal to the surface velocity). However, we can require that a surface be impermeable, that is no flow crosses the boundary. This then assures that the component of the velocity normal to the surface must be zero. So at least we can say something quantitative about a velocity component.
Basic Flows
In this section we present the governing equations for several basic flows. These equations are solutions of the Laplace equation and are determined through required boundary or imposed flow conditions. We deal with steady two dimensional flows.
Uniform Flow
The most simple flow (other than zero flow) is a steady uniform flow. This condition is a constant velocity in a given direction such that the velocity vector does not vary spatially. We designate this velocity as  . If we align our coordinate system along the direction of , such that
. If we align our coordinate system along the direction of , such that  is the direction of , then there is only one nonzero velocity component. The streamfunction would be expected to be a straight line along the direction of as well. Using the definition of
is the direction of , then there is only one nonzero velocity component. The streamfunction would be expected to be a straight line along the direction of as well. Using the definition of  we obtain the following:
we obtain the following:

Integrating this in  we obtain an expression for the streamfunction:
we obtain an expression for the streamfunction:
")
But since

then is not a function of and we obtain

(6.3.1)
We can arbitrarily set  at
at  so that
so that

(6.3.2)
If we proceed along the same line to solve for  from its definition relative to the partial velocity derivative, Eqn. (6.2.1), the result is:
from its definition relative to the partial velocity derivative, Eqn. (6.2.1), the result is:

(6.3.3)
where we have set  at
at  , other wise there is an additive constant which is equal to the potential at .
, other wise there is an additive constant which is equal to the potential at .
For a condition of uniform flow, again with velocity of U, but at some angle  to the axis we have the following (the reader is encouraged to obtain this result by integrating the definition of the streamfunction):
to the axis we have the following (the reader is encouraged to obtain this result by integrating the definition of the streamfunction):

(6.3.4)
The constant C is determined by a “datum” value of that passes through some point. For instance if  at
at ") then
then  .
.
Going back to uniform flow (two dimensional) aligned in the  direction we can find the volumetric flow rate per depth through some area say between
direction we can find the volumetric flow rate per depth through some area say between  and
and  as:
as:
 =
= =4U")
Source/Sink Flow
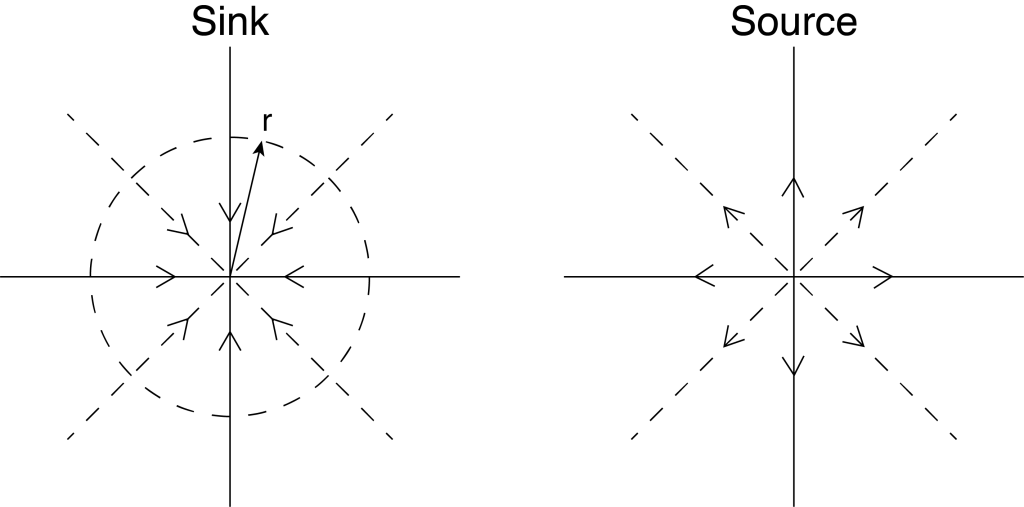
In two dimensional flow a source or a sink of flow is possible, since it implies that flow enters or leaves a given two dimensional plane. We treat this as a rate of gain (source) or loss (sink) of mass at some point within the flow. An example of this might be a simulation of a drain say in a tank with a flat bottom. Along the bottom plane flow leaves the plane of the bottom at a small opening. Here we shrink the size of the opening to a point (which is hard to imagine since we have mass flow rate through this point, since the velocity associated with this point is infinite across the plane). Despite these unrealistic characteristics, if we move away from this “singularity” point of infinite velocity and zero area we can assign a flow rate. This is illustrated in Figure 6.3.1, which illustrates how flow approaches the sink along the plane with velocity vectors that are inwardly, straight radial streamlines, as shown as vector lines in Figure 6.3.1.
By drawing a circle of an arbitrary radius, r, shown as the dashed line in Figure 6.3.1, the flow rate is determined by integrating the velocity around the circle. This is because the circle represents the flow area (per unit depth into the page), and the velocity vectors are each normal to the circle based on symmetry. The result for the mass flow rate per unit depth into the page is:

Note that  is negative for a sink and positive for a source.
is negative for a sink and positive for a source.
If a larger circle is drawn the same mass flow rate occurs into the point, but since the area is larger the velocity at the new larger circle is less. One can solve for the velocity, , at any radial position,  , as:
, as:

(6.3.5)
For a constant steady volumetric flow, , we see that the velocity decreases linearly as  increases. So this flow has straight streamlines all represented as radial lines from the center point. We see how the velocity increases rapidly in magnitude as goes to zero, at which point it becomes infinite (or undefined). Based on the orthogonal condition between the velocity potential and streamfunction we see that lines of constant potential are circles (like the dashed line shown in Figure 6.3.1.)
increases. So this flow has straight streamlines all represented as radial lines from the center point. We see how the velocity increases rapidly in magnitude as goes to zero, at which point it becomes infinite (or undefined). Based on the orthogonal condition between the velocity potential and streamfunction we see that lines of constant potential are circles (like the dashed line shown in Figure 6.3.1.)
We can combine the constants in Eqn. (6.3.5)  , where
, where  is the “source strength” with units of
is the “source strength” with units of  in SI units such that:
in SI units such that:

(6.3.6)
Eqn. (6.3.6) represents the flow from a source with strength . The source pumps fluid into the plane of flow with streamlines that are radially outward.
The flow can be reversed such that the flow along the radial lines is inward. This implies flow is exiting the plane, and this is a “sink”, with velocity inward, which has a negative  component:
component:

(6.3.7)
The streamfunction is found by integrating the velocity based on the definition of the streamfunction using cylindrical coordinates:


(6.3.8)
Velocity potential lines are found from the definition of the potential relative to the velocity:

Integrating this results in:

(6.3.9)
Vortex Flow
Now consider a swirling flow such that the streamlines are circles. This implies that there is no radial velocity component, only  . We label this swirling flow as a “vortex”, often called a “free vortex” since it is free from external forcing. It is also irrotational. If streamlines are circles as is shown in Figure 6.3.2 then velocity potential lines must be straight radial lines from the center of the circle to be orthogonal to the streamlines.
. We label this swirling flow as a “vortex”, often called a “free vortex” since it is free from external forcing. It is also irrotational. If streamlines are circles as is shown in Figure 6.3.2 then velocity potential lines must be straight radial lines from the center of the circle to be orthogonal to the streamlines.
To construct a flow with the above characteristics we examine the possible flow in cylindrical coordinates. Here we use the definition of the streamfunction in cylindrical coordinates:

}{\partial r}")
So if we consider the flow to be given by its velocity  , where
, where  is a constant, then the vorticity will be zero as required. Inserting this into the definition for the streamfunction above yields:
is a constant, then the vorticity will be zero as required. Inserting this into the definition for the streamfunction above yields:

(6.3.10)
Next we define the “circulation”  , as the line integral of the velocity around a closed line, or a loop, as:
, as the line integral of the velocity around a closed line, or a loop, as:

(6.3.11)
This has units of in SI units. Inserting the expression for above and noting that  with the integration carried out between 0 and 2
with the integration carried out between 0 and 2 , we get:
, we get:

(6.3.12)
The result is that the circulation within the vortex is a constant that can be determined knowing . We can replace C with  and solve for the velocity as:
and solve for the velocity as:
(6.3.13)
where we define the “vortex strength” as:

(6.3.14)
And also using the definition of vorticity, which must be zero to be irrotational, as:
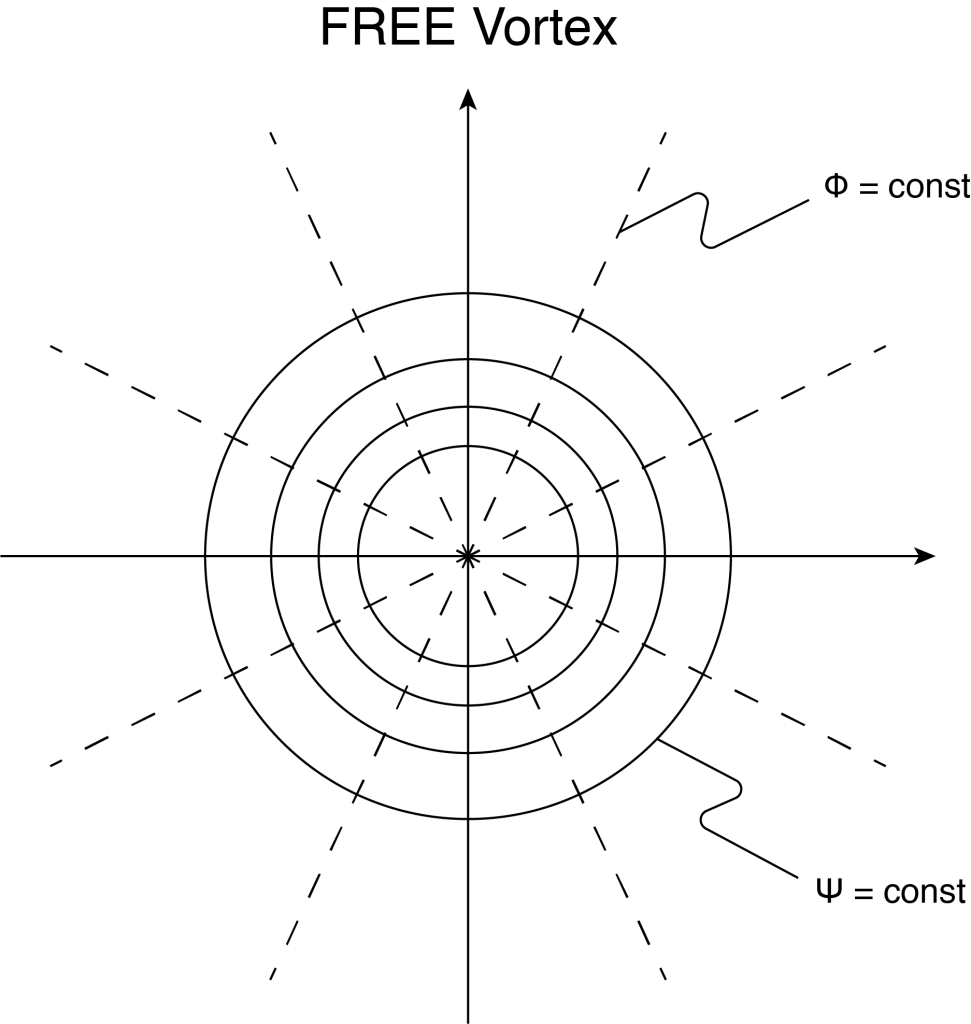
The flow for a free vortex is shown in Figure 6.3.2 indicating streamlines as circles and the velocity potential as straight radial lines. Notice that theses lines are just the inverse of what we found for the source.
Since streamlines can have the velocity direction either counterclockwise or clockwise and still have the same general form with the same equations as shown above the sign convention is that a counterclockwise rotation is positive, and a clockwise rotation is negative. This is expressed in the value of  or
or  . In other words counterclockwise flow has positive circulation.
. In other words counterclockwise flow has positive circulation.
One last interesting aspect of the free vortex and the circulation is as follows. We use the vector identity:
dA=\oint{\boldsymbol{V}\cdot d\boldsymbol{s}}}")
where  is any vector,
is any vector,  is an area and
is an area and  is the vector distance along a closed loop integration around the area
is the vector distance along a closed loop integration around the area  . If we let be the velocity and noting that the vorticity is
. If we let be the velocity and noting that the vorticity is ") and that the loop line integral is the circulation given above, then we can see that:
and that the loop line integral is the circulation given above, then we can see that:

(6.3.15)
Consequently the circulation is the area integral of the vorticity in some selected area within the flow. Note that we are dealing with a two dimensional flow and dA is within the plane of the flow so the vorticity is aligned along a vector out of the plane.
Now we have a bit of a dilemma. A free vortex has finite values of velocity that result is a certain circulation. This circulation is proportional to the vorticity within the flow. But we have said that the flow is irrotational, which means that the vorticity is zero. How can the circulation be nonzero while the vorticity is zero? The answer is that the vorticity (that drives the circular velocity) is concentrated at the center of the circle. Away from the center of the circle we know the vorticity is zero since the velocity we are using,  , was based on the vorticity being zero. If one calculates the circulation about a circular loop of radius
, was based on the vorticity being zero. If one calculates the circulation about a circular loop of radius  (an area of
(an area of  ) and then repeats this calculation for a larger area of radius
) and then repeats this calculation for a larger area of radius  , the result will be the same. This shows that in the area between and there is no added vorticity since the circulation remains the same. This can be done for any arbitrarily small radius , showing that in the limit of r going to zero there is no vorticity within the flow except at r=0. A free vortex has a concentration of vorticity at r = 0. Also, the velocity must go to infinity, a velocity singularity. Interestingly this says that we can have isolated vorticity concentrations within an otherwise irrotational flow field.
, the result will be the same. This shows that in the area between and there is no added vorticity since the circulation remains the same. This can be done for any arbitrarily small radius , showing that in the limit of r going to zero there is no vorticity within the flow except at r=0. A free vortex has a concentration of vorticity at r = 0. Also, the velocity must go to infinity, a velocity singularity. Interestingly this says that we can have isolated vorticity concentrations within an otherwise irrotational flow field.
Superposition
As stated previously superposition is a powerful tool that allows us to construct more complex flows from several simple flows. This is possible since the governing equation for the streamfunction, that describes streamlines, and the velocity potential are linear, is the Laplace equation.
Rankine Oval
We begin by examining the flow field in the vicinity of a source and sink. We place the source and sink on the axis separated by distance 2a, as is shown in Figure 6.3.3 (a), with the origin mid way between each. The source is on the left (negative , and the sink is on the right (positive ). The streamfunction,or the velocity potential, at any point in the flow can be obtained by added together the streamfunction, or velocity potential, from the source plus that for the sink. However, care must be taken into account since our previously obtained equations were written assuming the source/sink were located at the origin of our coordinate system. In this case they are shifted along the  axis. The result for any point P, located at (
axis. The result for any point P, located at ( ) in the flow at distance and from the sink and source, respectively is:
) in the flow at distance and from the sink and source, respectively is:


(6.3.16)
where it is assumed the source and sink have equal but opposite strength and the angles are shown in Figure 6.3.3. Similarly for the velocity potential:

(6.3.17)
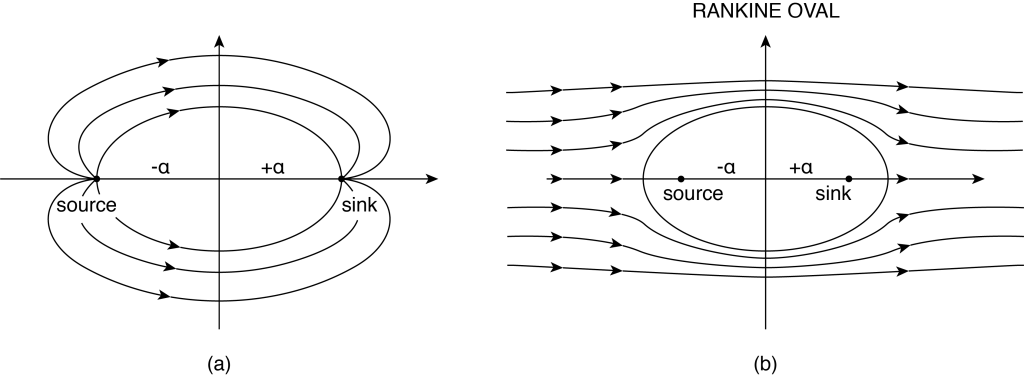
axis distance “a” from the origin, the source on the left and sink is on the right; (b) superposition of a uniform flow, a source and a sink which creates a Rankine OvalIn order to arrive at an equation for the streamfunction for the combined flow we use a trig identity:
=\frac{tan{\theta }_1\pm \ tan\ {\theta }_2}{1\mp tan\ {\theta }_1tan\ {\theta }_2}")
So taking the arctan of both sides and noting that  and
and  , so that the right hand side of the above equation becomes:
, so that the right hand side of the above equation becomes: ") , the streamfunction is:
, the streamfunction is:

(6.3.18)
For example, the streamfunction at ") for a = 2 is
for a = 2 is ") .
.
At this point we have a source and sink separated by a distance of 2a. Extending this we can add a uniform flow in the positive direction to the combined source sink flow to obtain the following:

(6.3.19)
where the last term is the result written in cylindrical coordinates. If we set the streamfunction equal to some constant we can plot the associated streamline from Eqn. (6.3.19). In particular setting an oval results as shown in Figure 6.3.3 (b). This is known as the Rankine Oval. The characteristics of this oval can be adjusted by inserting different values for for a given . The characteristics of the oval are:
 =\ 2a{\left(1+\frac{2{\mu }_s}{a}\right)}^{1/2}")

(6.3.20)
It is possible then to model the flow over an oval surface with an approach velocity of U by Eqn. (6.3.19). The velocity is determined by taking the derivatives of  relative to , and
relative to , and  . The geometry of the oval can be adjusted by varying the strength of the source/sink as well as their locations,
. The geometry of the oval can be adjusted by varying the strength of the source/sink as well as their locations,  .
.
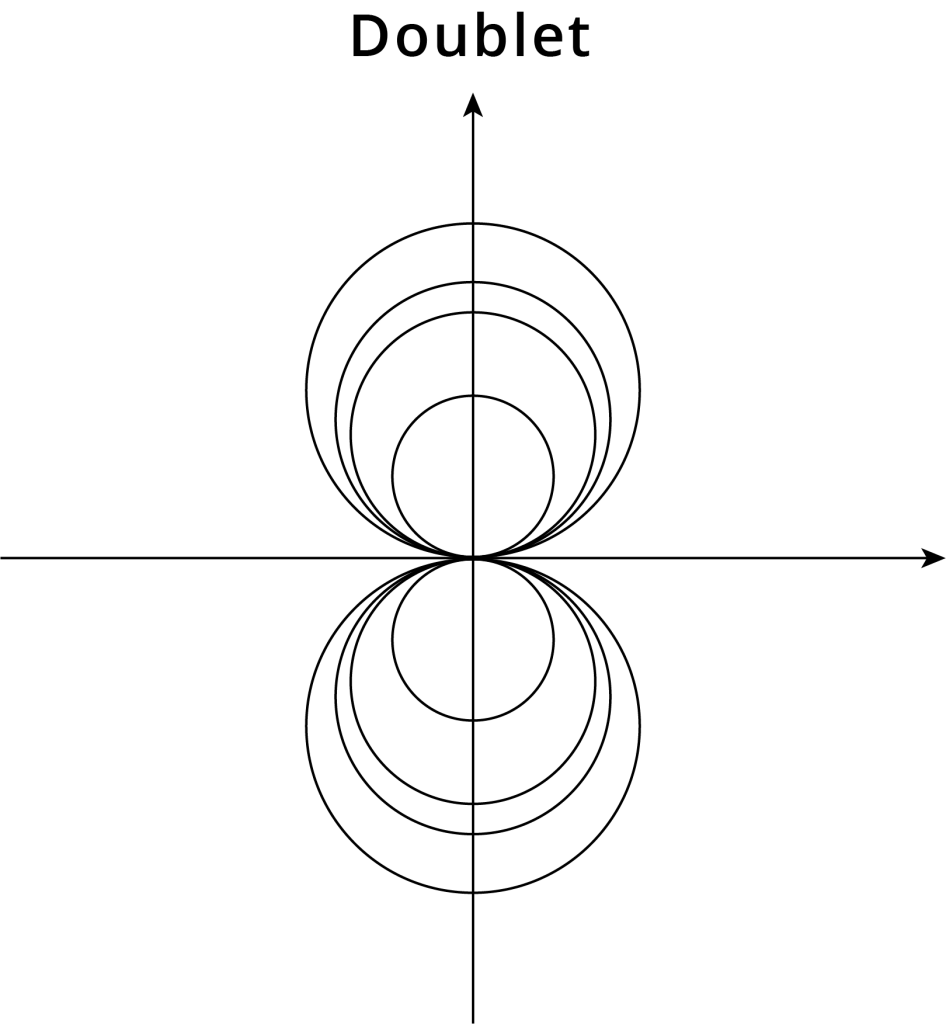
Doublet
A doublet is a result of construction of a flow field using the superposition of a source and a sink that are placed very close to each other. The superposition of these two will result in flow leaving the source and entering the sink. The flow lines form circular paths as the flow attempts to leave the source while being drawn in to the sink. By making the strength of the source and sink identical a symmetric flow will result. It will be shown how this flow establishes a streamline that is a circle in the limit of the source and sink approaching each other spatially. This type of flow has powerful applications to simulate more complicated flows as we will see.
To extend the use of a source and sink of equal strength to a doublet we take the limit as their separation distance  . First we note that the arc tan of a small number is equal to the number so
. First we note that the arc tan of a small number is equal to the number so =\frac{2ax_2}{{x_1}^2-a^2+{x_2}^2}") then we have:
then we have:

Since we want we will also let  at the same time and say
at the same time and say  , where is some constant. This may seem arbitrary but it assures us that the streamfunction doesn’t vanish to zero and since we can set
, where is some constant. This may seem arbitrary but it assures us that the streamfunction doesn’t vanish to zero and since we can set  to any desired value. The result is that we can rewrite the equation for the streamfunction of a doublet as:
to any desired value. The result is that we can rewrite the equation for the streamfunction of a doublet as:

(6.3.21)
where  a constant that determines the “strength of the doublet”. This equation can be rearranged:
a constant that determines the “strength of the doublet”. This equation can be rearranged:
}^2={\left(\frac{{\mu }_d}{2\psi }\right)}^2")
Noting that for a constant value of the coefficient on the right inside the parenthesis, and the same term added to is a constant resulting in an equation of a circle. The center of the circle changes with changing values of as does the radius of the circle. The result is a series of streamlines for selected values of , each of which is a circle centered along the axis as is shown in Figure 6.3.4. Notice that the radius of the circle is  .
.
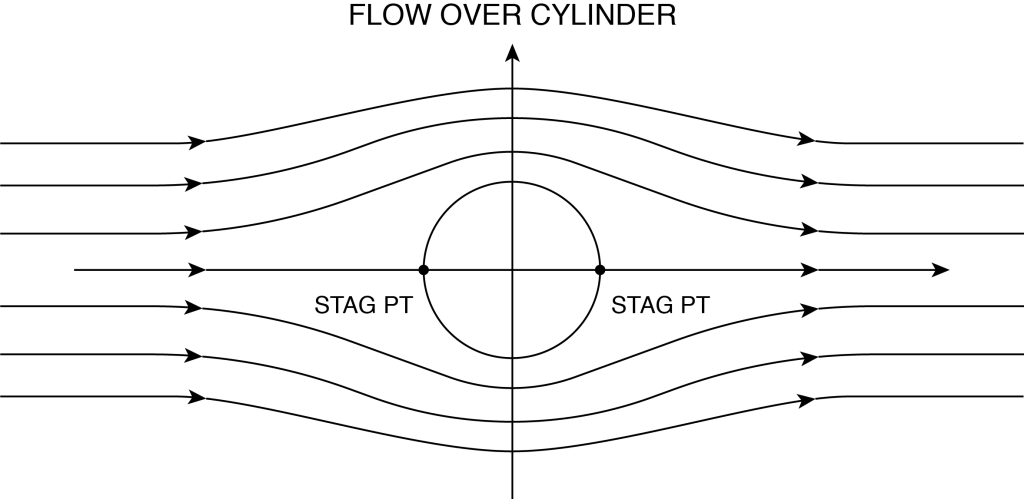
Uniform Flow over a Cylinder
The doublet can be added to a uniform flow in the positive direction resulting in a streamfunction given by:

(6.3.22)
This equation can be recast in cylindrical coordinates where  ,
,  and
and  and we define
and we define }^{1/2}") , a constant for a given value of , the result is:
, a constant for a given value of , the result is:

(6.3.23)
It can be seen that in the limit of large values of the flow reverts back to uniform flow and the contribution for the doublet goes to zero. If we let then  , a constant. That is to say, the streamfunction of is a circle of radius a. So we have now constructed the flow field for uniform flow over a cylinder of radius
, a constant. That is to say, the streamfunction of is a circle of radius a. So we have now constructed the flow field for uniform flow over a cylinder of radius 
From this the velocity components in the  coordinates are found to be:
coordinates are found to be:
")

(6.3.24)
and the velocity vector is  = {v_r}^2+{v_{\theta }}^2") . The streamline distribution is shown in Figure 6.3.5. We are only interested in the flow on the outside of the circle, which represents a cylinder. It is important to note that at , the velocity is not zero and depends on
. The streamline distribution is shown in Figure 6.3.5. We are only interested in the flow on the outside of the circle, which represents a cylinder. It is important to note that at , the velocity is not zero and depends on  . So at different positions around the cylinder surface the velocity will change. The largest velocity occurs at
. So at different positions around the cylinder surface the velocity will change. The largest velocity occurs at  and
and  , which represents the top and bottom of the cylinder. This is where the streamlines converge the most indicative of high velocity flow. Also at
, which represents the top and bottom of the cylinder. This is where the streamlines converge the most indicative of high velocity flow. Also at  and
and  the velocity is zero. These are stagnation points on the cylinder. Notice also that the streamlines are symmetric about the and axes. This has important implications on the forces that exist on the cylinder caused by the flow.
the velocity is zero. These are stagnation points on the cylinder. Notice also that the streamlines are symmetric about the and axes. This has important implications on the forces that exist on the cylinder caused by the flow.